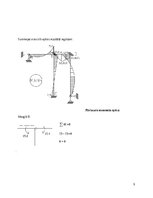
Dots: Statiski nenoteicams rāmis atbilstoši 1.att.
Darba uzdevums:
1. noteikt sistēmas kinemātiskās nenoteicamības pakāpi;
2. izvēlēties pārvietojumu metodes pamatsistēmu;
3. uzkonstruēt vienības un slodzes epīras;
4. atrast kanonisko vienādojumu koeficientus un brīvos locekļus;
5. noteikt lieko nezināmo skaitliskās vērtības;
6. uzkonstruēt M, Q un N epīras;
7. aprēķina gaitā veikt nepieciešamās pārbaudes.
1. Noteikt sistēmas kinemātiskās nenoteicamības pakāpi
Lai noteikt W, visos mezglos, ieskaitot balstus, ievestas locīklas.
W=3*D-(2*L+S)=3*4-(2*(1*1+2*1)+6)=12-12=0
Mūsu sistēma ir statiski noteicama un ģeometriski nemainīga.…